ANYmal
The ANYmal Component allows you to connect your ANYbotics ANYmal robot to the DroneDeploy Robotics Portal via an ANYbotics server. Communication can occur bidirectionally using the component. This means you can both receive telemetry from and send commands to ANYmal, remotely using the DroneDeploy Robotics Portal.
Configuration:
To use the ANYmal Component, your agent will need a section in its agent-settings.json file which enables the anybotics Component, as shown below. For more information on how to configure the agent components, see Agent Configuration.
{
"enabled": true,
"id": "anybotics",
"settings": {
"address": "anymal-server-address:58050",
"robotName": "dtest",
"certPath": "/etc/opt/rocos-agent/anymal.crt",
"keyPath": "/etc/opt/rocos-agent/anymal.key",
"uploadDataDirectory": "/var/opt/rocos-agent/data/raw/anymal",
"logLevel": 6
}
},
The above JSON example shows how your ANYbotics Component could be configured.
| Name | Description |
|---|---|
enabled | Whether to enable the ANYbotics Component or not. |
address | Address of the ANYbotics server through which the agent will communicate with an ANYmal robot. |
robotName | The unique identifier for the ANYmal robot with which to communicate. |
certPath | File path of the .crt file for authentication with the ANYmal server. |
keyPath | File path of the .key file for authentication with the ANYmal server. |
uploadDataDirectory | Directory in which data retrieved from the ANYmal robot should be stored. In accordance with the DroneDeploy file standard this should be set to /var/opt/rocos-agent/data/raw/anymal for standard linux computers running the agent. |
logLevel | The logging verbosity: 1 - very quiet, 6 - very talkative. |
Data Model
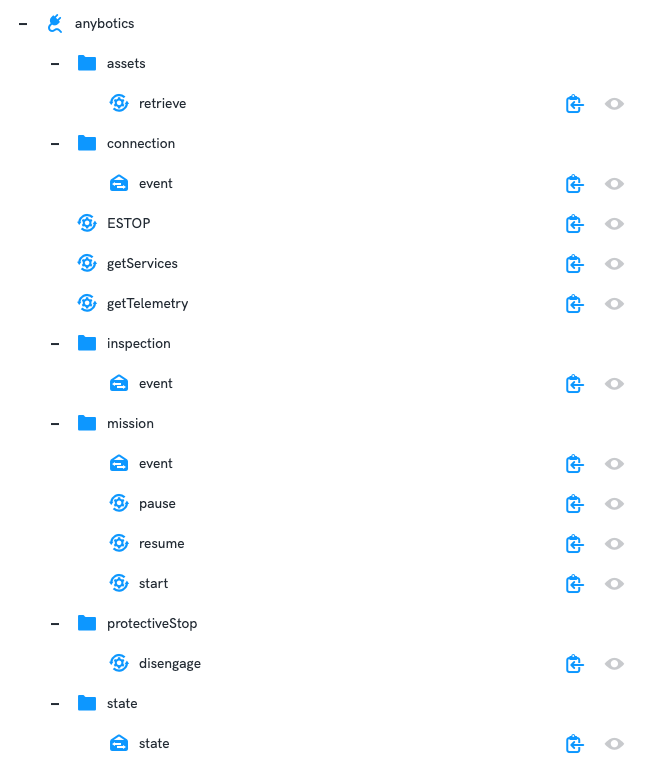
ESTOP
Services
/anybotics/ESTOP : this service triggers the protective stop of the robot.
/anybotics/protectiveStop/disengage: this service disengages the protective stop of the robot, allowing subsequent motion commands to be accepted.
Assets
Services
/anybotics/assets/retrieve:returns the list of assets known to the robot.
Connection
Telemetry
/anybotics/connection/event : when a successful connection between the server and the ANYmal robot is detected, a message will be sent on this topic.
Inspection
Telemetry
/anybotics/inspection/event : inspection data returned from the robot is sent on this topic.
Mission
Telemetry
/anybotics/mission/event : mission events returned from the robot are sent on this topic. This includes feedback on the current mission step and progress towards its completion.
Services
/anybotics/mission/start:starts the specified mission. The mission is specified with the missionID service input. An optional initialTask can also be specified to tell the robot which step in the mission it should skip to.
/anybotics/mission/stop: stops the currently running mission.
/anybotics/mission/pauses: pauses the currently running mission.
State
Telemetry
/anybotics/state : information on the robot state is published to this topic. This includes information such as joint states and the robot's position in the map.