Operations
Operations
We use our operations feature when trying to visualise the robot in a 3D environment. This can be a global environment on a map or a local environment utilising a 3D model.
An operation involves one or more robots that are involved in an overall business objective. The user of the platform decides how big the commercial and geographic scope of an operation is. The DroneDeploy Robotics Portal provides interfaces for users to monitor and interact with live operations. An example might be a set of drones working together on a single search and rescue operation, or another might be a set of rovers delivering packages in a specific city.
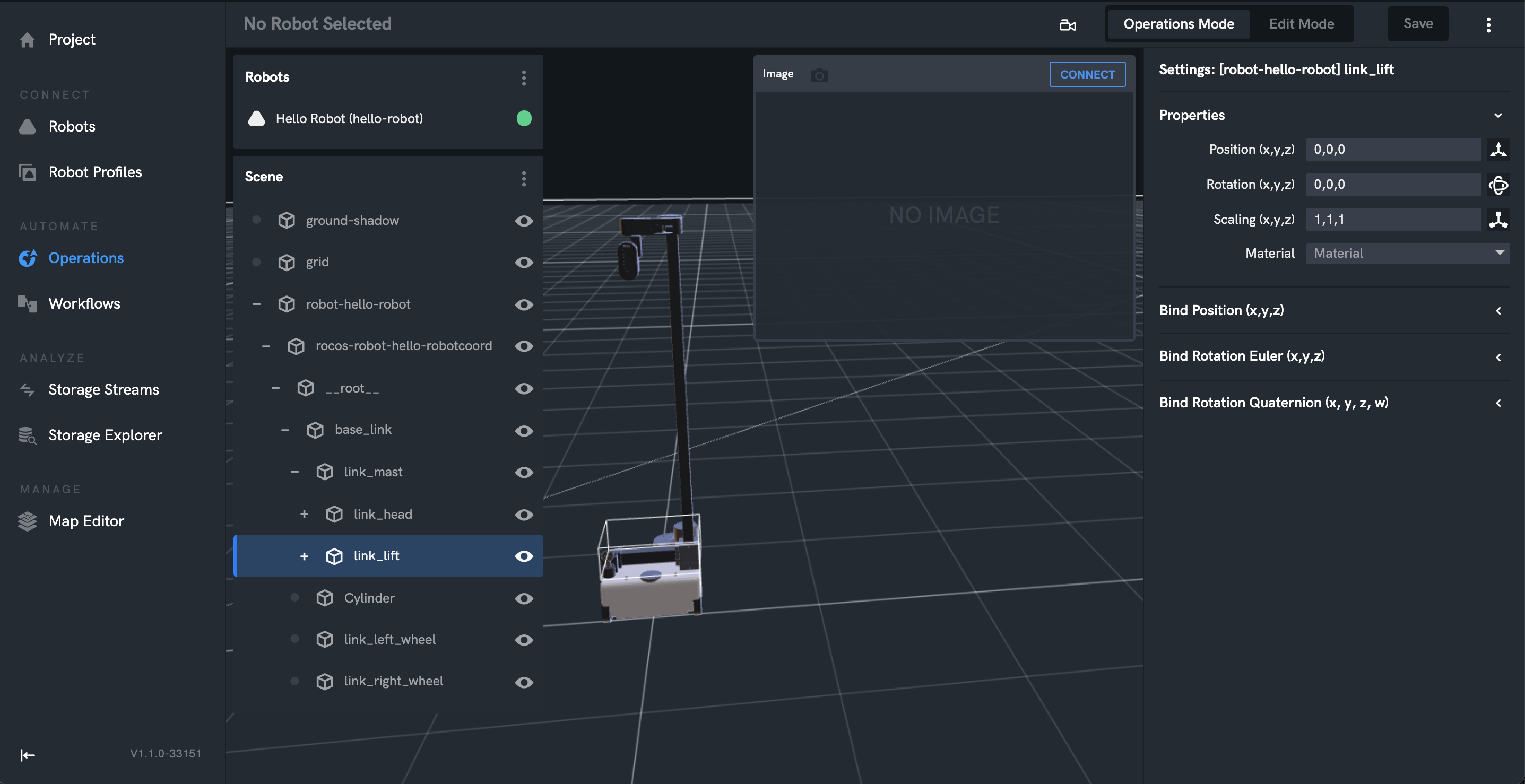
Local Operations
The location of the robot relative to its local environment. Often this form of navigation is calculated by SLAM. Ideally multiple robots as part of a Robotics Portal project share a common model for local environment and therefore know their location relative to each other, but this is not required. You can import 3D models of the environment. This could also be point cloud models to give an accurate environment for the robot. For more details click here.
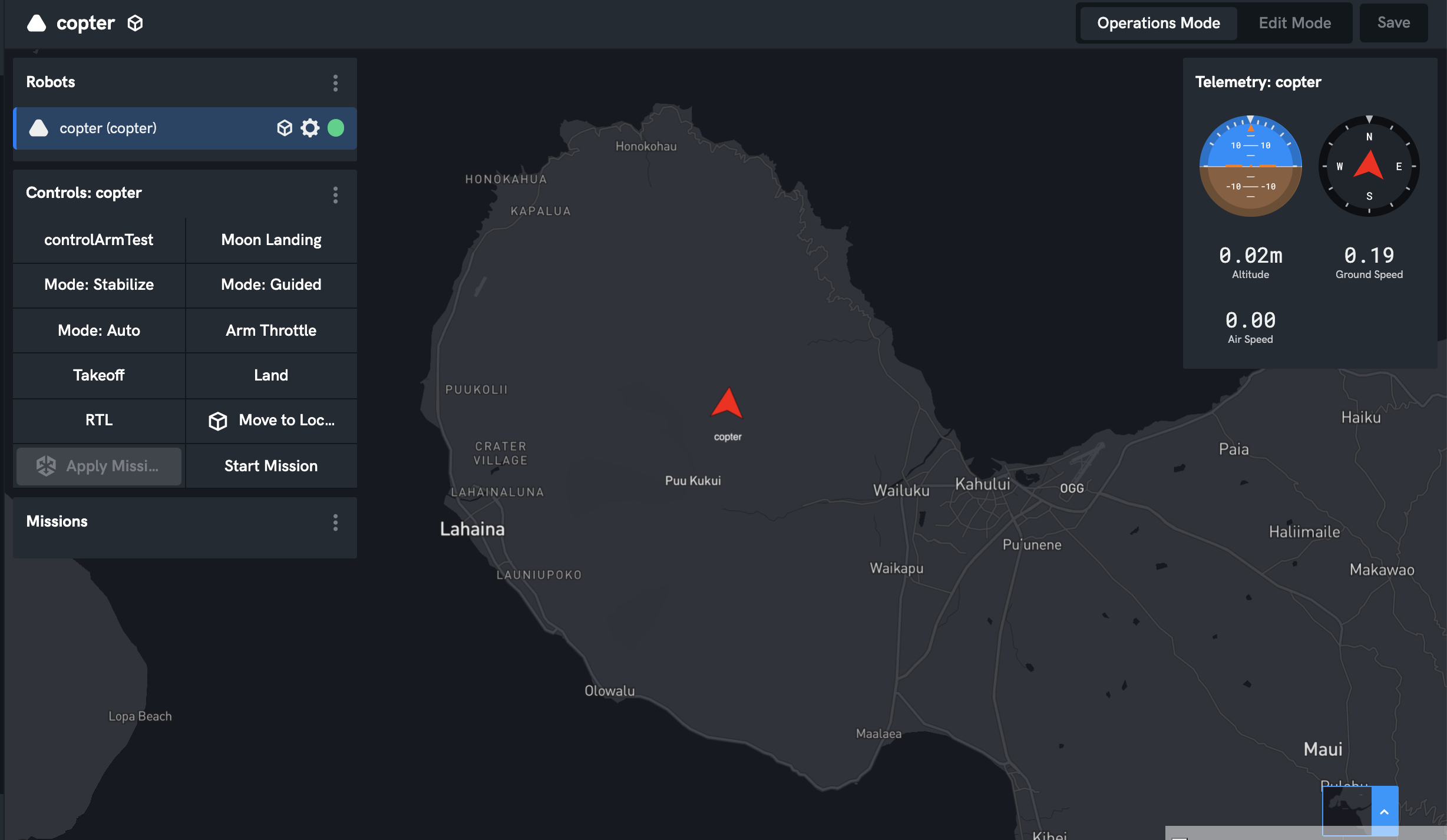
Global Operations
The location of the robot in terms of Latitude, Longitude and Altitude. Most often Global location is determined by an onboard GPS. Any robot with a Global Location therefore knows it's position relative to other robots.