Local Operations
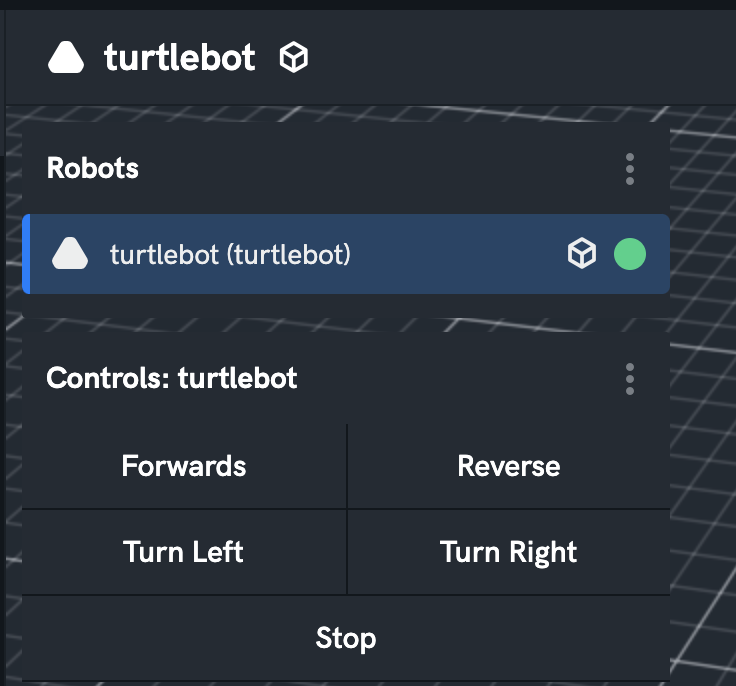
Robot Control
You can select the Robot and this will open the controls pane which shows any buttons configured. You can configure these for an individual robot or for a robot profile.
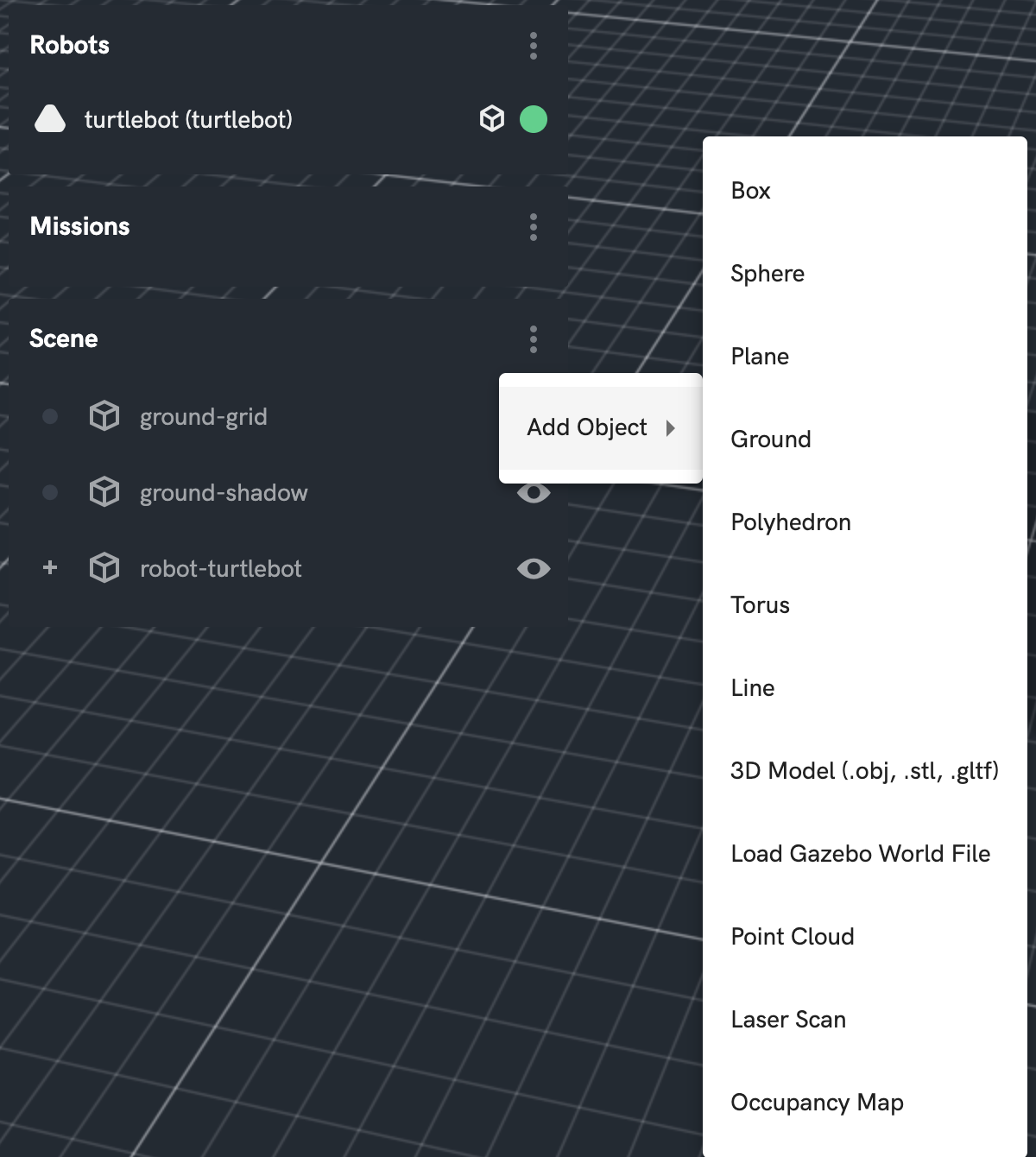
Scene
You can add items to your scene and local environment. We currently support the following formats. You can bind all of these items to telemetry if required to give a real representation of your environment. See the section below.
- 3D Model (.obj, .stl, .gltf)
- Gazebo World File
- Point Cloud
- Laser Scan
- Occupancy Map
File Upload
You can upload a 3D model of you Robot(s) into your local operations view. Click on the robot in the Scene and then use the right hand side panel to upload a 3D model (.stl, .obj, .gltf). These will be stored on a project level. If you upload a file to a project where the name already exists you will be able to override it or use existing to avoid uploading again.

3D Model Binding
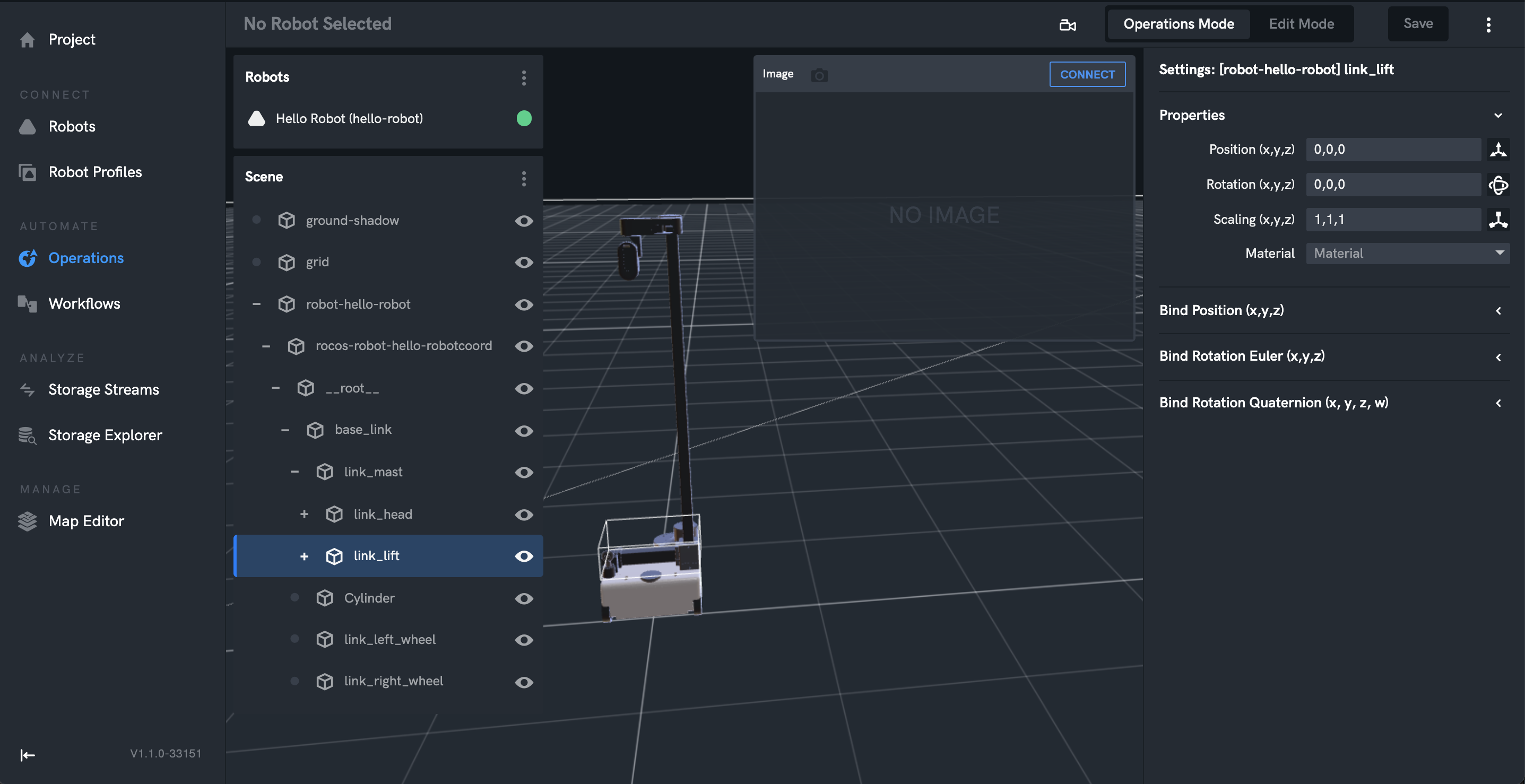
You can select objects in the scene and this then opens a panel on the right hand side. Here you can update the position, orientation and scaling. You should bind the model to telemetry and then use the properties section as an offset to fix orientation or position issues.
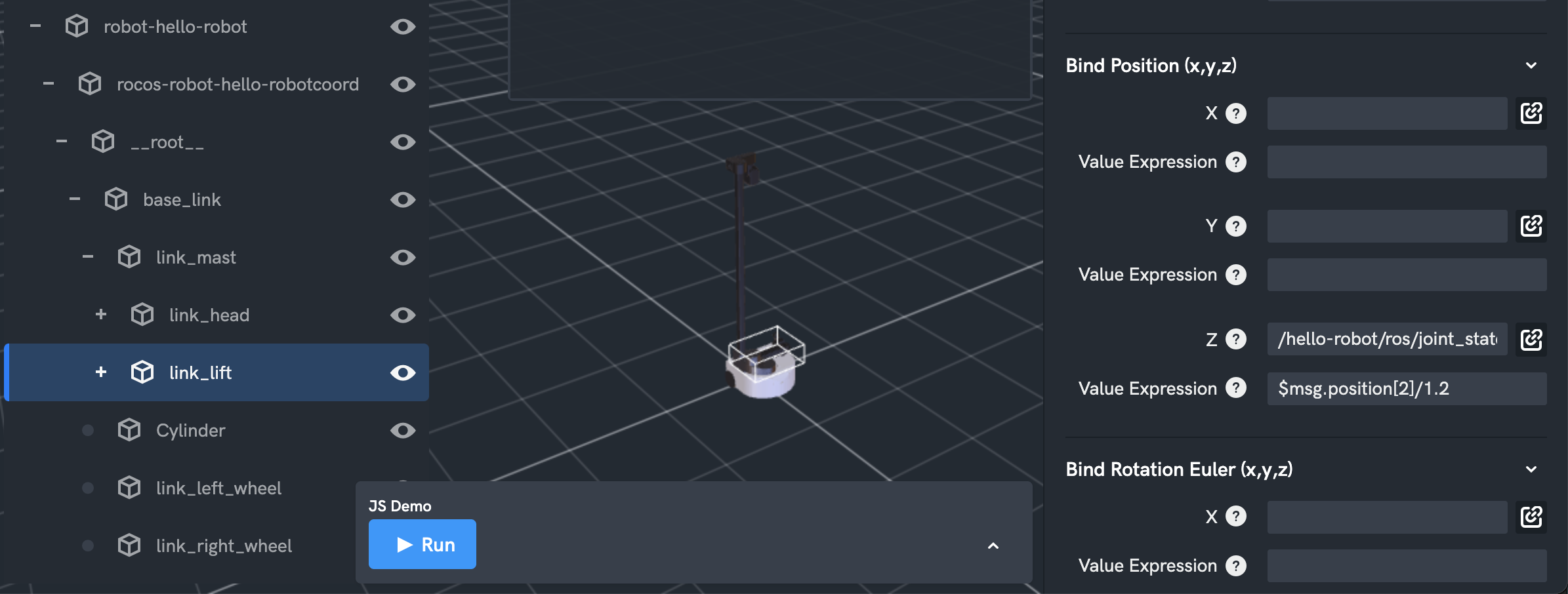
Binding Telemetry
You can also expand the headings below this and bind telemetry to the position and rotation (Either Euler or Quaternion). See image below. Expand the bind position/rotation sections. Click on the data picker icon to choose the telemetry to bind to.
You are able to use the value expression to pull position or rotations out of joint state arrays or to do manipulations as required.
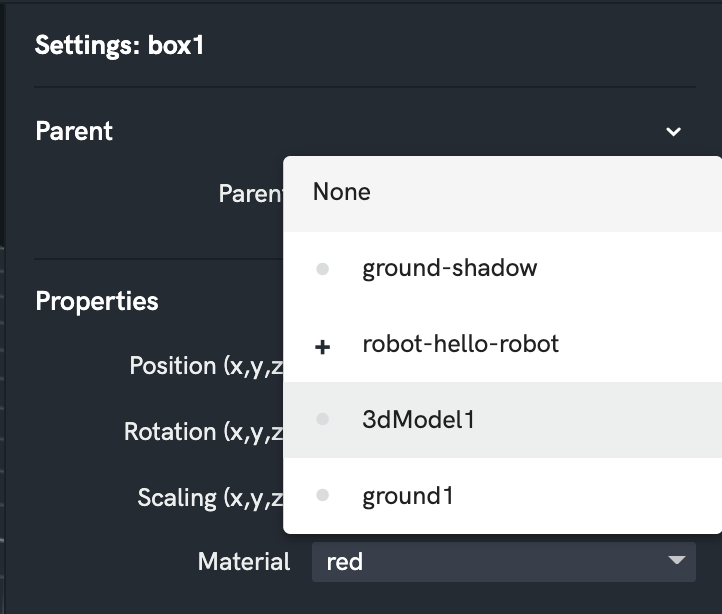
Parent Structure
For the root element of each object you can select the parent for the object. You can use this for binding a laser scan to a child element on the robot model for example. Click on the object in the scene you want to bind to another object, and then select the correct parent from the right hand side menu. You can bind the object to any level of the model so use the plus button to expand this tree out.