Location Mission Widget
Widget Type: rc-location-mission
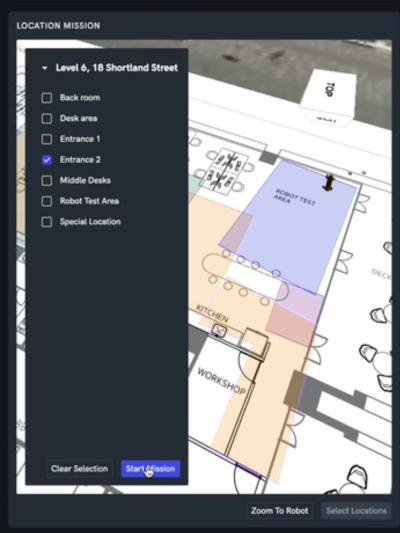
Lets an operator pick a target location (or one of a saved set) on a 3D map and dispatch a single flow against it. Shares the same scene + robot/snail-trail rendering as the Mission Monitor Widget.
Configuration
mapBoxToken Mapbox token used to render the base map.
googleMapsApiKey Google Maps API key used for base imagery.
origin (optional) Origin used when creating a new scene.
tilesUrl (optional) Tile server URL.
parentFrame (optional) Frame in which positions are interpreted.
flowId The flow that will be dispatched with the chosen target location as input.
snailTrailQuery, snailTrailColor, robotConfig Same shape and meaning as the Mission Monitor Widget.
Example (MAVLink)
{
"mapBoxToken": "<your-mapbox-token>",
"googleMapsApiKey": "<your-google-maps-key>",
"parentFrame": "WGS84",
"flowId": "robotic-360wt",
"snailTrailQuery": {
"topic": "/mavlink/GLOBAL_POSITION_INT",
"maxAge": { "value": 5, "unit": "h" },
"expression": "(payload) => [payload.lon / 10e6, payload.lat / 10e6, payload.alt / 10e6]",
"pollRate": 1
},
"snailTrailColor": "magic",
"robotConfig": {
"type": "boundModel",
"robotBindings": [
{ "source": "/mavlink/GLOBAL_POSITION_INT", "binding": "position" }
]
}
}